|
系所概况: 机器人与智能系统研究所是西安交通大学高端装备研究院下属主要研究所之一。研究所根据中国西部科技创新港总体规划部署,面向国际科学技术前沿、国家重大战略需求以及国民经济建设主战场,重点研究机构设计、智能感知、驱动与控制、激光加工工艺、智能管控等技术,探索生物机电、新材料、人机共融等未知科学,集成开发技术装备与系统,实现机器人与智能系统成果的转移、转化和产业化应用。通过研究方向聚集和培养高端人才,建设具有国际一流水平的机器人与智能系统科学高地,为国家培养一流科技人才,服务国家地方经济发展。 师资队伍: 机器人与智能系统研究所现有37名教师,包括教授15人、博士生导师24人,师资力量雄厚、梯次合理。梅雪松教授是我国智能制造和机器人重大项目专家组成员,网络协同制造和智能工厂重点专项专家组成员;陈贵敏教授是我国柔顺机构领域活跃专家,担任国际权威期刊ASME J Mech Robot副主编;张小栋教授长期从事智能检测、诊断与控制以及智能机器人技术方面的研究与教学工作,担任中国振动工程学会理事、动态测试专业委员会常务副主任,全国高校机械工程测试技术研究会常务副理事长,英文SCI期刊IntelServ Robot、J MechSciTechnol编辑和中文核心EI期刊《振动、测试与诊断》常务编委等;胡桥研究员从事水下(仿生)机器人及智能感知技术等国防科研工作10余年,担任中国造船工程学会、中国仪器仪表学会等理事以及《水下无人系统学报》编委。 序号 | 姓名 | 团队 | 邮箱 | 职称 | 备注 | 1 | 梅雪松 | 激光精密制造与机器人团队 | xsmei@mail.xjtu.edu.cn | 教授 | 所长
学科带头人(长江,领军) | 2 | 王文君 | 激光精密制造与机器人团队 | wenjunwang@xjtu.edu.cn | 教授 | 团队负责人 | 3 | 王恪典 | 激光精密制造与机器人团队 | kdwang@mail.xjtu.edu.cn | 教授 | | 4 | 崔健磊 | 激光精密制造与机器人团队 | cjlxjtu@mail.xjtu.edu.cn | 教授 | | 5 | 孙孝飞 | 激光精密制造与机器人团队 | xfsunxjtu@xjtu. | 教授 | | 6 | 段文强 | 激光精密制造与机器人团队 | debo1128@163.com | 副研究员 | | 7 | 凡正杰 | 激光精密制造与机器人团队 | fzj0717@sina.com | 教授 | | 8 | 刘斌 | 激光精密制造与机器人团队 | liubin1110@xjtu.edu.cn | 副研究员 | | 9 | 孙铮 | 激光精密制造与机器人团队 | zheng.sun@xjtu.edu.cn | 副研究员 | | 10 | 赵万芹 | 激光精密制造与机器人团队 | linazhao@xjtu.edu.cn | 副研究员 | | 11 | 潘爱飞 | 激光精密制造与机器人团队 | aifeipan@xjtu.edu.cn | 助理教授(青秀) | | 12 | 王晓东 | 激光精密制造与机器人团队 | 19916255311@qq.com | 助理教授 | | 13 | 姜歌东 | 机器人与智能制造团队 | gdjiang@mail.xjtu.edu.cn | 教授 | 团队负责人 | 14 | 陶涛 | 机器人与智能制造团队 | taotao@mail.xjtu.edu.cn | 教授 | | 15 | 施虎 | 机器人与智能制造团队 | tigershi@mail.xjtu.edu.cn | 教授 | 党支部书记 | 16 | 徐俊 | 机器人与智能制造团队 | xujunx@mail.xjtu.edu.cn | 教授 | | 17 | 赵飞 | 机器人与智能制造团队 | ztzhao@xjtu.edu.cn | 研究员 | | 18 | 杨军 | 机器人与智能制造团队 | softyj@mail.xjtu.edu.cn | 教授 | 副所长 | 19 | 运侠伦 | 机器人与智能制造团队 | yunxlxl@xjtu.edu.cn | 教授 | | 20 | 许睦旬 | 机器人与智能制造团队 | xumuxun@xjtu.edu.cn | 教授 | | 21 | 梁瑶 | 机器人与智能制造团队 | liang.yao@xjtu.edu.cn | 研究员 | | 22 | 闵超庆 | 机器人与智能制造团队 | chaoqing.min@tjtu.edu.cn | 副研究员 | | 23 | 王海涛 | 机器人与智能制造团队 | wanghaitao@xjtu.edu.cn | 高级工程师 | | 24 | 杨汉博 | 机器人与智能制造团队 | hanboyang@xjtu.edu.cn | 助理教授 | | 25 | 郭喆晨 | 机器人与智能制造团队 | guozhechen@xjtu.edu.cn | 助理教授 | | 26 | 耿涛 | 机器人与智能制造团队 | ttgeng@xjtu.edu.cn | 副研究员 | | 27 | 张小栋 | 生机电融合与服务机器人团队 | amct@mail.xjtu.edu.cn | 教授 | 团队负责人/副所长 | 28 | 徐海波 | 生机电融合与服务机器人团队 | hbxu@mail.xjtu.edu.cn | 教授 | | 29 | 张英杰 | 生机电融合与服务机器人团队 | yjzhang@mail.xjtu.edu.cn | 教授 | | 30 | 朱爱斌 | 生机电融合与服务机器人团队 | abzhu@mail.xjtu.edu.cn | 教授 | 副支部书记 | 31 | 史晓军 | 生机电融合与服务机器人团队 | shixiaojun@ xjtu.edu.cn | 教授 | | 32 | 王晶 | 生机电融合与服务机器人团队 | wangpele@gmail.xjtu.edu.cn | 教授 | | 33 | 张政 | 生机电融合与服务机器人团队 | zhangzh@mail.xjtu.edu.cn | 副教授 | | 34 | 张东升 | 生机电融合与服务机器人团队 | zds@mail.xjtu.edu.cn | 副教授 | | 35 | 陈贵敏 | 柔性与人形机器人技术团队 | guimin.chen@xjtu.edu.cn | 教授 | 团队负责人 | 36 | 王朝晖 | 柔性与人形机器人技术团队 | chhw@mail.xjtu.edu.cn | 教授 | | 37 | 李博 | 柔性与人形机器人技术团队 | liboxjtu@mail.xjtu.edu.cn | 教授 | | 38 | 郑腾飞 | 柔性与人形机器人技术团队 | tengfz@xjtu.edu.cn | 副研究员 | | 39 | 王斌 | 柔性与人形机器人技术团队 | wb8751@163.com | 副研究员 | | 40 | 白瑞玉 | 柔性与人形机器人技术团队 | ruiyubai@xjtu.edu.cn | 副研究员 | | 41 | 周文 | 柔性与人形机器人技术团队 | w.zhou@xjtu.edu.cn | 助理教授 | | 42 | 姚家强 | 柔性与人形机器人技术团队 | jqyao@xjtu.edu.cn | 助理教授 | | 43 | 胡桥 | 水下智能感知与仿生机器人团队 | hqxjtu@mail.xjtu.edu.cn | 教授 | 副所长(长江、卓青,领军) | 44 | 苏文斌 | 水下智能感知与仿生机器人团队 | wbsu@mail.xjtu.edu.cn | 教授 | | 45 | 朱子才 | 水下智能感知与仿生机器人团队 | zicaizhu@xjtu.edu.cn | 副教授 | | 46 | 李宏伟 | 水下智能感知与仿生机器人团队 | lihongwei@mail.xjtu.edu.cn | 副教授 | | 47 | 邵杰 | 水下智能感知与仿生机器人团队 | shao-jie@foxmail.edu.cn | 助理教授 | | 48 | 张大禹 | 水下智能感知与仿生机器人团队 | 15734010074@163.com | 助理教授(青秀)) | | 49 | 张宇坤 | 水下智能感知与仿生机器人团队 | zhangyukun@xjtu.edu.cn | 助理教授 | |
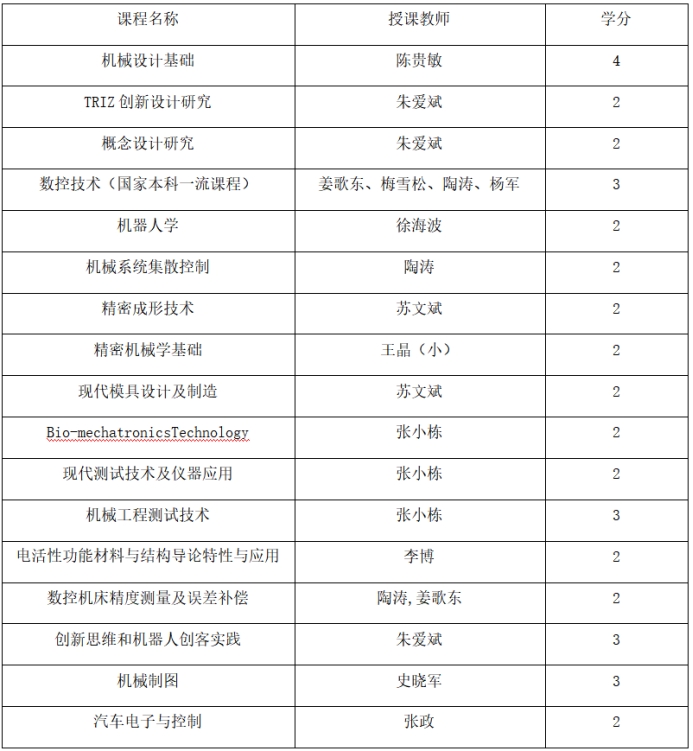
部分课程教学:
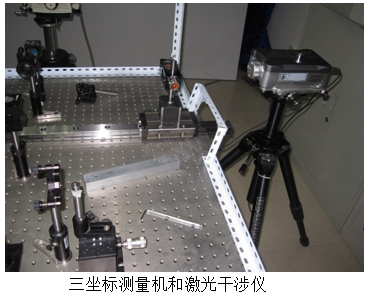
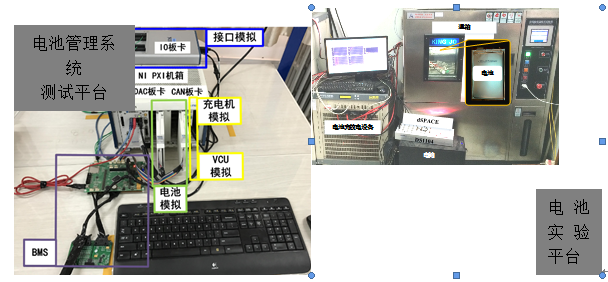
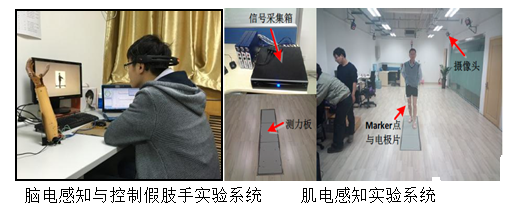
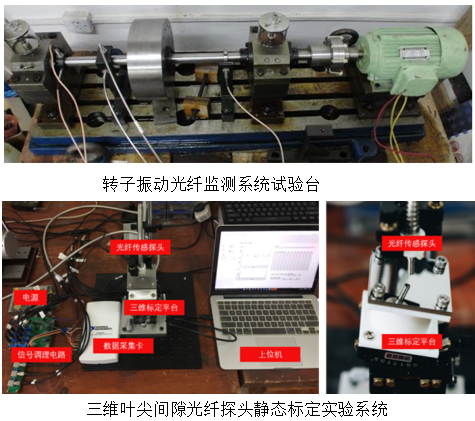
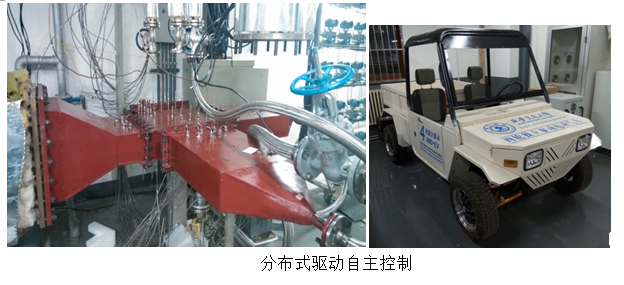
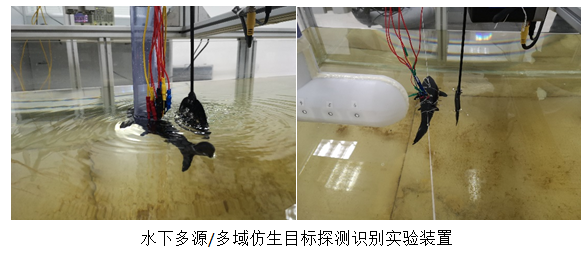
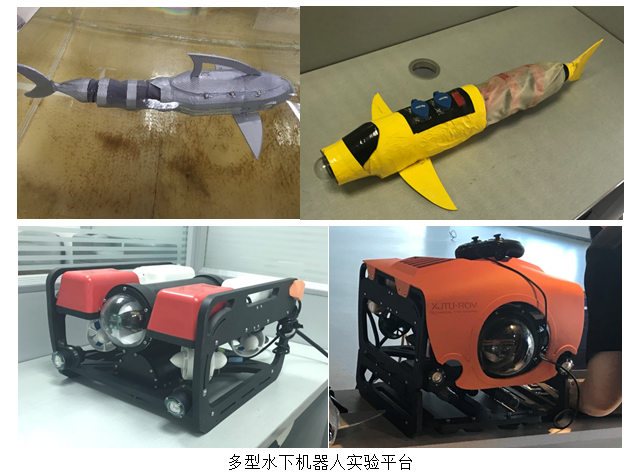
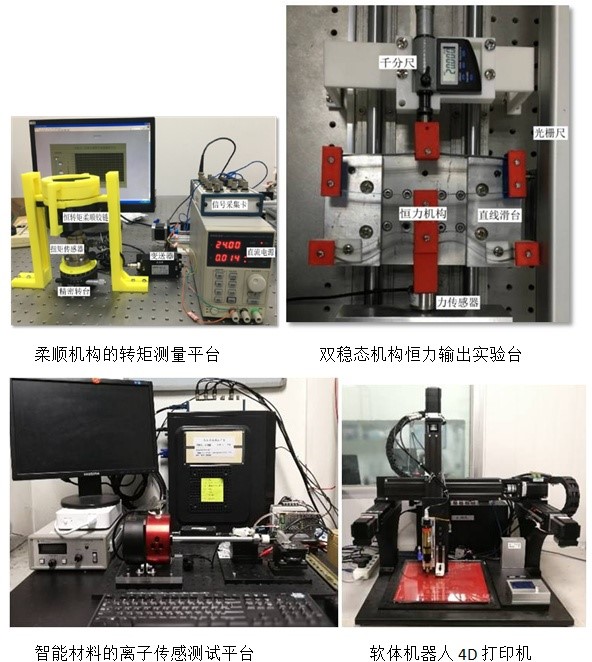
本研究所共有五个团队: 团队1:激光精密制造技术与装备团队 激光精密制造技术与装备,以激光精密加工基础理论、关键技术、高端装备为主要研究方向,团队现有教师12人,包括教授6人,副研究员4人,助理教授2人, 博士生导师5人,目前在读博士20余人,在读硕士60余人。近年来,承担了包括国家重点研发计划、国家两机专项、国家自然科学基金重点项目、国防预研等国家级、省部级项目30余项,校企联合横向课题10余项,团队在研项目总经费超3000万元;获陕西省技术发明一等奖1项;发表SCI论文200余篇,授权发明专利100余项,成果应用于西航、商发、黎明、中电38所、航天六院等龙头企业,相关研究成果成功孵化激光智能制造企业。 团队2:机器人与智能制造团队 机器人与智能制造团队以智能工厂和智能机器人基础理论与关键技术为主要研究方向,是支撑陕西省智能机器人公共科技服务平台和西安交大机器人创新研究院、西安交大具身智能机器人研究院的重要科研和教学实体,团队现有教师14人,包括教授7人、研究员2人、高工1人、副研究员3人、助理教授2人,其中博士生导师8人、硕士导师5人。团队目前在读博士30余人,在读硕士人60余人。近年来,承担了包括国家重点研发计划、国家科技重大专项、973计划、863计划、国家自然科学基金重点项目等国家级、省部级项目40余项,校企联合横向课题20余项,项目额超1.9亿元;获得国家科技进步奖2项、省部级科技技术一等奖6项;获得国家教学成果奖1项,陕西省教学成果奖1项;发表SCI/EI论文300余篇,授权发明专利40余项。指导学生获国际级、国家级机器人大赛一等奖和二等奖10余项。相关研究成果孵化移动机器人企业一家 团队3:生机电融合与服务机器人团队 本团队聚焦生机电融合理论、方法与技术,提出“脑控技术”和“多元输入-多元输出脑认知模型”和仿生智能控制理论与技术问题,研究脑-肌电与光纤多源感知、脑控、肌电控、脑肌融合、类人操控、人机交互和协同控制、仿生智能控制与集群、精密检测与智能运维的理论和方法,开展助老、助残、助行、巡检、救援和手术等服务机器人,以及重载无人机和驱控一体化等关键技术研究,积极谋求相关机器人样机成果转化,并促成其在重点行业应用系统开发和示范应用。 研究方向包括:脑肌多源感知、人机交互及医学康复机器人,环境智能感知、机器学习及移动服务机器人,自主导航控制、多机协同及智能巡检机器人,光纤精密感知、监测诊断及智能运维机器人,主动感知、视-触觉融合及类人操控技术、重载无人机智能控制与驱控一体化。 研究特色和内容包括:通过研究人体运动意图的精密感知理论与方法、多信息融合的机器视觉与智能人机交互、机器人运动路径规划与行为自主决策,以及重载无人机仿生智能控制理论以探索动作智能的奥秘,实现人机运动的动态协同,开展多种服务机器人的关键技术研究与其原型样机的开发。研究内容主要包括:多信息融合的机器视觉与智能人机交互;机器人运动路径规划与行为自主决策;人-机器人交互理论研究与应用;精密感知、深度学习理论与实现;感知功能一体化神经控制假肢研究与实现;重载无人机智能控制与驱控一体化,以及机电控综合优化设计等。 团队4:柔性与人形机器人技术团队 团队主要涉及4个研究内容: (1)刚柔软机器人—生物数百万年演化出“骨骼 + 筋腱 + 肌肉”一体化的高能效身体结构。从仿生学出发,研究综合运用刚体机构、柔顺机构/结构以及软体智能材料,融合各自的特点、发挥各自的优势,形成类比于生物体的高能效机器人系统 ,并服务于人形机器人、微小型仿生机器人等。 (2) 连续体机器人—研究深腔作业环境约束下的超长径比连续体机器人的设计、驱动以及非线性力学特性,探索机器人刚度调控方法,实现机械臂在极端条件下的灵巧动作和大负载操作,应用于微创手术机器人等。 (3) 仿生驱动/感知器件与机器人—研究电压驱动人工肌肉材料制造工艺、驱动机理和控制技术,优化人工肌肉的变形幅度、提升驱动力和响应速度,探索多尺度复合构造大驱动力人工肌肉驱动器;研究离子感应型柔性感知材料、原理与制造技术,模拟生物驱动与感知构造原理,发展柔性传感与驱动一体化助力、爬行和水下多种仿生机器人。 (4) 微流控系统及其应用—研究微流控系统中流体的流动规律和控制方法,探索微流体中微纳米颗粒和微液滴运动的控制方法,开发面向生物化学检测、医疗康复机器人、人体表皮检测的可变性微流控器件。 团队5:水下智能感知与仿生机器人团队 该团队聚焦水下机器人多物理场智能信息感知、水陆两栖仿生机器人关键技术、水下机器人集群及任务载荷等关键技术领域,围绕国家海洋战略和重大需求,开展水下复合多物理场复合智能探测感知技术、探通一体化水下无人航行器平台、水陆两栖仿生波动推进机器人、水下无人智能探测作业一体机器人、驱感控一体隐身侦测技术研究。 团队主要涉及5个研究内容: (1)水下复合多物理场复合智能探测感知技术—针对传统单一水声探测存在的环境抗干扰能力弱、高速目标检测精度不足、动态复杂水下环境中高速目标多物理场耦合特征解析等难题。本研究创新性地构建了基于多模态传感信息融合的目标特性建模框架,采用了水下高速目标多物理场信息融合策略与辨识方法,提高了水下动态复杂环境下目标多物理场特性建模准确性以及探测系统对高速来袭目标的作用距离和检测准确率。 (2)探通一体化水下无人航行器平台—针对UUV低速机动控制难题,突破传统舵效不足导致的高机动动作执行瓶颈。通过构建流线型回转体多自由度航行系统,创新性地采用六推进器姿态闭环布局架构,实现俯仰/横滚/偏航多维度运动解耦控制。有效提升低速工况下的机动响应速度和运动稳定性,为水下精细探测作业提供高精度平台支撑。 ((3)水陆两栖仿生波动推进机器人—针对传统刚性推进器水陆运动模态割裂、跨介质运动效率骤降等科学难题。通过构建基于柔性波动鳍的多模态推进系统,还原真实生物运动,实现水/陆环境自适应的仿生波动推进,推进效率较传统桨舵系统大大提升,为复杂环境两栖作业提供新型解决方案。 (4)水下无人智能探测作业一体机器人—针对机器人在水下探测与作业系统集成困难、协同作业难度大等问题,通过模块化架构设计攻克探测-作业多系统耦合干扰问题。创新采用动态耦合补偿算法与分布式总线控制技术,构建了具有任务自适配能力的智能作业平台,实现视觉探测、机械臂操作、环境感知等多模态功能的协同运作,实现“一平台、多用途“。 (5)驱感控一体隐身侦测技术—针对传统电机驱动刚性水翼运动模态少,噪声明显等技术瓶颈,搭建了多种基于柔性驱动器的仿生水下航行平台,提升了仿生水下航行器驱动效果及驱动尺寸,降低噪声提升隐蔽性,为隐蔽侦测任务提供了新型解决方案。 实验条件: 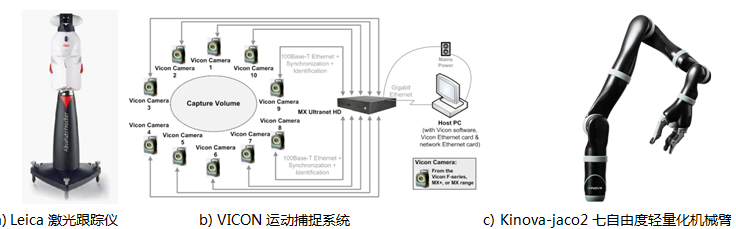


柔性机器臂 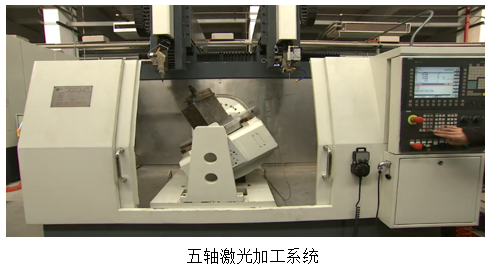



研究环境: 

科研成果: 近三年近3年,研究所聚焦智能机器人前沿技术研究,涵盖机器人智能运动控制、核心功能部件研发、多信息感知与人机交互、仿生学与机构创新设计四大方向。评估期内,重点实验室立项承担国家级项目27项,其中国家重点研发计划项目1项,国家重点研发计划课题6项,国家自然科学基金企业联合基金重点项目1项,国家自然科学基金深圳联合基金重点项目子课题1项,国家自然科学基金面上基金7项,国家自然科学基金青年基金1项,军口各类项目10项;立项承担省部级项目22项,其中陕西省各类项目7项、其他省部级项目15项。立项承担横向课题目25项;累计获得科研经费8323.242万元,科研项目取得长足进步。其中,省部级以上项目共计49项,累计获得科研经费7510.68万元,占总数的90.24%。 研究所在专利授权和科学技术奖等方面也有显著提升,累计获申请发明专利43项,授权发明专利52项,软件著作权10项,获国家科技进步二等奖2项和多项陕西省自然科学奖。 奖项列表 序号 | 奖励类别 | 项目名称 | 完成人 | 获奖等级 | 1 | 国家科学技术进步奖(2021年) | 高端包装印刷装备关键技术及系列产品开发 | 梅雪松等 | 二等奖 | 2 | 国家科学技术进步奖(2024年) | 高档数控机床精度及其稳定性提升关键技术与应用 | 梅雪松等 | 二等奖 | 3 | 陕西省自然科学奖 | 高端装备大柔顺精 密机构主动设计性 能调控 | 陈贵敏、白瑞玉、李博等 | 一等奖 | 4 | 陕西省科技发明奖 | 难加工材料的激光精密加工技术与应用 | 梅雪松等 | 一等奖 | 5 | 教育部高等学校科学研究优秀成果科学技术进步奖 | 数控机床动态误差分析关键技术应用 | 梅雪松、姜歌东、陶涛、张东升、赵飞等 | 一等奖 | 6 | 中国机械工业科学技术奖 | 高端包装印刷装备技术及系列产品开发 | 梅雪松,许文才,陈邦设等 | 一等奖 | 7 | 陕西高等学校科学技术研究优秀成果奖 | 外骨骼机器人的人体意图感知及助力效率测试关键技术研究 | 朱爱斌、张小栋等 | 一等奖 | 8 | 高等学校科学研究优秀成果自然科学奖 | 机械装备的复合故障智能诊断理论与方法 | 雷亚国,訾艳阳,何正嘉,胡桥 | 一等奖 |
部分项目课题列表 序号 | 项目(课题)名称 | 编号 | 负责人 | 起止时间 | 经费(万元) | 项目来源 | 1 | 面向航空航天重大产品制造过程的多源异构大数据分析及处理技术研究 | 2020YFB1712502 | 张政 | 2020-11-24至 2023-10-31 | 70 | 国家重点研发计划课题 | 2 | 面向多机协作的半导体制造智能工厂物流调度和优化软件开发 | 2022YFB3305000 | 姜歌东 | 2022.11-2025.10 | 4000 | 国家重点研发计划项目 | 3 | 物料装卸转运机器人智能操作与多机型协作 | 2022YFB3305002HZ | 史晓军 | 2022-11-01至 2025-10-31 | 70 | 国家重点研发计划课题 | 4 | 下肢运动意图精细感知和人机互适应学习的康复评估技术研究 | 2023YFC3604903 | 朱爱斌 | 2023-12-01至 2026-11-30 | 240 | 国家重点研发计划课题 | 5 | 变流控制下发电机齿轮箱集成式传动系统动力学特性与振动抑制技术研究 | 2023YFB4202801HZ | 张英杰 | 2023-12-01至 2027-06-30 | 100 | 国家重点研发计划课题 | 6 | 柔性压电复合材料的共形结构设计与集成制造 | 2023YFB3208403HZ | 郑腾飞 | 2023-12-01至2026-11-30 | 70 | 国家重点研发计划课题 | 7 | 工业机器人监测与控制多源信息获取及传输方法 | 2018YFB1306101 | 胡桥 | 2019-06-01至2022-05-31 | 297 | 国家重点研发计划课题 | 8 | 基于性能退化的滚珠丝杠副动态可靠性评估理论与优化设计方法研究 | U22B2081 | 姜歌东 | 2023-01-01至2026-12-31 | 257 | 国家自然科学基金企业创新发展联合基金重点项目 | 9 | 可穿戴下肢康复运动辅助外骨骼机器人关键技术研究 | U1813212HZ | 朱爱斌 | 2018-12-01至 2022-12-31 | 120 | 国家自然科学基金深圳联合重点基金资助项目 | 10 | 超高速微电主轴纳米流体热管高效散热机制研究 | 51875446 | 史晓军 | 2019-01-01至 2022-12-31 | 60 | 国家自然基金面上项目 | 11 | 高端制造装备的故障形成机理及可靠性提升关键技术研究 | 51875445 | 张英杰 | 2019-01-01至 2022-12-31 | 61 | 国家自然基金面上项目 | 12 | 航空发动机叶片裂纹的三维叶尖间隙全息解析及定量诊断方法研究 | 52175117 | 张小栋 | 2022-01-01至 2025-12-31 | 58 | 国家自然基金面上项目 | 13 | 外骨骼辅助航天员低重力运动模拟的主被动补偿方法研究 | 52175061 | 朱爱斌 | 2022-01-01至 2025-12-31 | 58 | 国家自然基金面上项目 | 14 | 模拟心肌组织力学微环境的基于声表面波和软基驱动的柔性类器官芯片研究 | 52175545 | 王朝晖 | 2022-01-01至2025-12-31 | 75.4 | 国家自然基金面上项目 | 15 | 剪纸多稳态超材料的逆向设计 | 52475030 | 李博 | 2024-01-01至 2027-12-31 | 43 | 国家自然基金面上项目 | 16 | 基于脑器交互框架的舌-机接口康复机理与交互方法研究 | 62373295 | 王晶 | 2024-01-01至 2027-12-31 | 50 | 国家自然基金面上项目 | 17 | 曲面共形柔顺折展机构设计方法研究 | 52305034 | 白瑞玉 | 2024-01-01至2026-12-31 | 30 | 国家自然基金青年项目 | 18 | 反***一体化 | 2022-JCJQ-JJ-*** | 胡桥 | 2022.11- 2027.11 | 500 | 中央军委科学技术委员会(基础加强项目) | 19 | ***多源智能信息融合XX技术 | JCKY2020110C074 | 胡桥 | 2021.01- 2023.12 | 360 | 国防科工局基础科研 | 20 | ***振动传递机理及响应特性研究 | 202022300003 | 胡桥 | 2021-01-01至2025-12-31 | 280 | 中央军委重点项目(中央军委重点项目) |
招生就业: 机器人与智能系统研究所每年招收研究生130人左右,其中包括硕士生近100人,博士生30余人,均在机器人与智能系统研究的相关领域开展工作,毕业后部分前往国内外知名高校和研究所进一步学习或工作,部分进入国内骨干或外资性企业,从事与专业相关的工作。
| 
